|
I am a Lead Researcher at T-Bank AI Research and hold a Ph.D. in Computer Science, which I earned at Skoltech within Evgeny Burnaev's Applied AI Center. I received a Master's Degree in Data Science from the Skoltech in 2020. Prior to that, I received my Bachelor's in Applied Mathematics and Physics from the Moscow Institute of Physics and Technology (MIPT) in 2018. Email / Google Scholar / Twitter / Github |

|
|
|
|
I'm interested in computer vision, deep learning, 3d. |
|
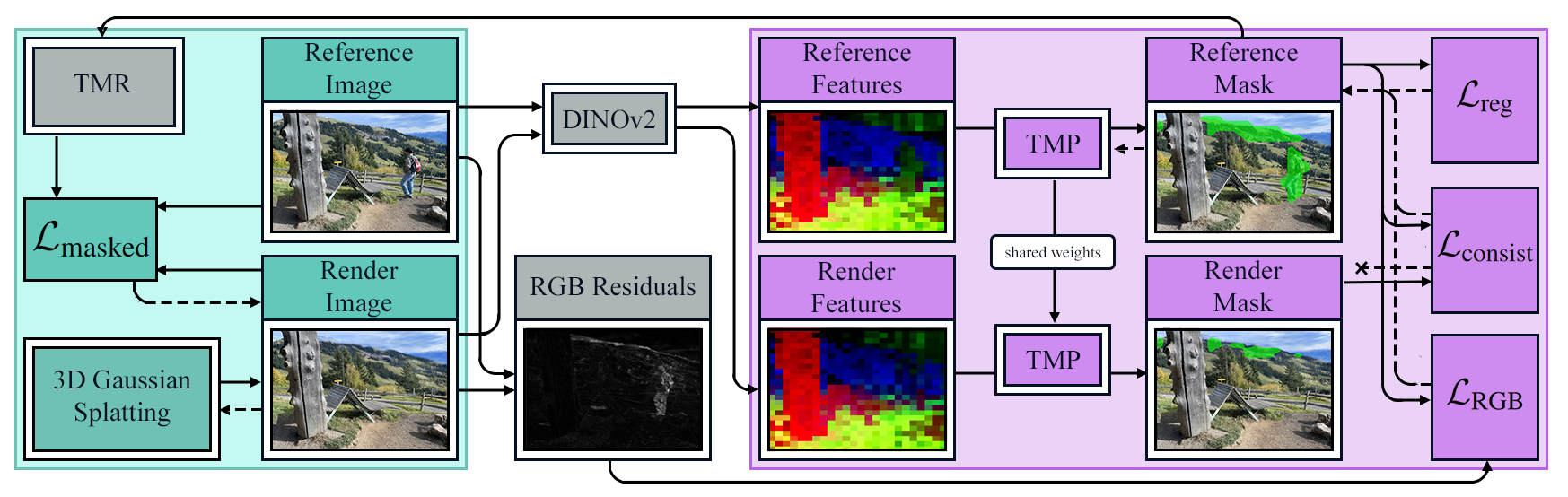
Vadim Pryadilshchikov, Alexander Markin, Artem Komarichev, Ruslan Rakhimov, Peter Wonka, Evgeny Burnaev Preprint, 2024 project page / arXiv / code We propose a novel framework that leverages 3D Gaussian Splatting to effectively remove transient objects from input videos, enabling accurate and stable 3D scene reconstruction. |


|
Gennady Sidorov, Malik Mohrat, Denis Gridusov, Ruslan Rakhimov, Serkey Kolubin IROS (Oral), 2025 project page / arXiv / code We present a novel approach that integrates dense keypoint descriptors into 3D Gaussian Splatting to enhance visual localization, achieving state-of-the-art performance on popular indoor and outdoor benchmarks. |
|
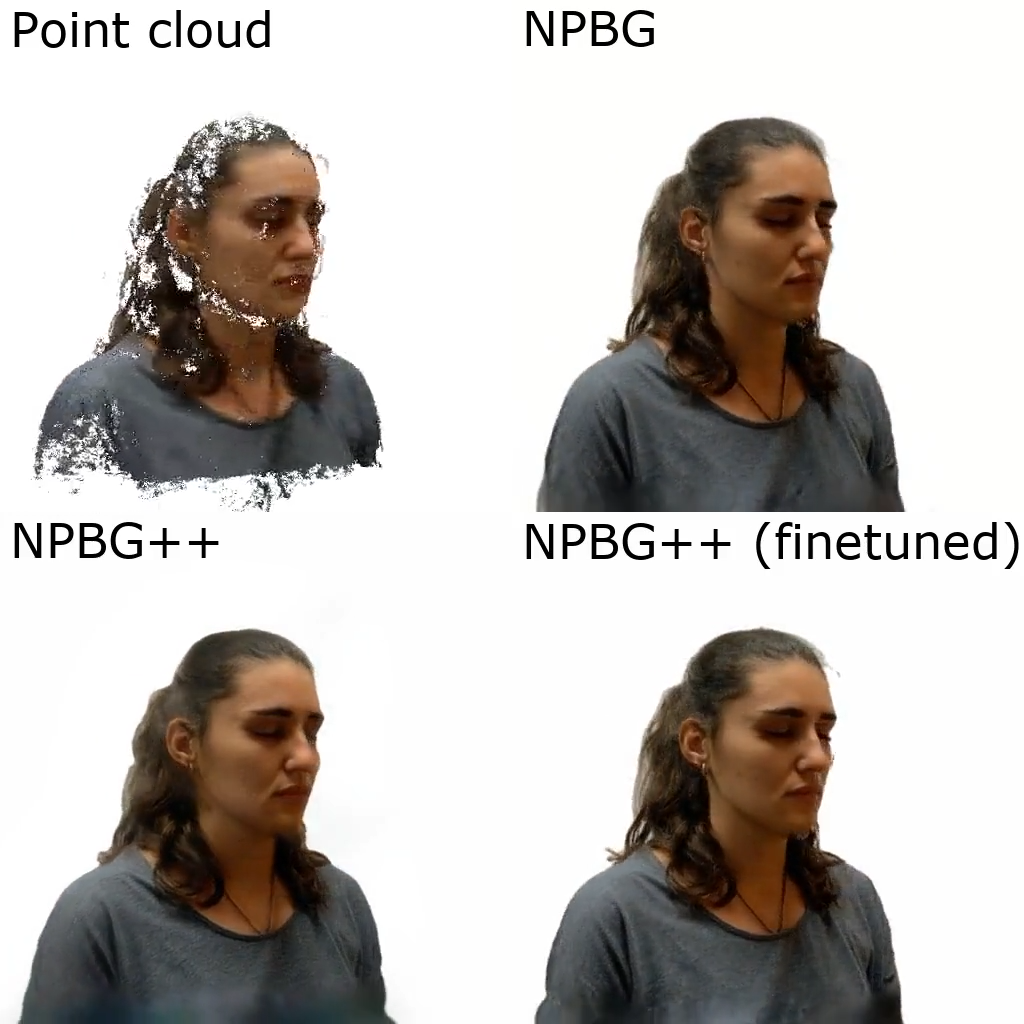
Ruslan Rakhimov, Andrei-Timotei Ardelean, Victor Lempitsky, Evgeny Burnaev CVPR, 2022 project page / arXiv / code We take the original NPBG pipeline and make it work without per-scene optimization. |
|
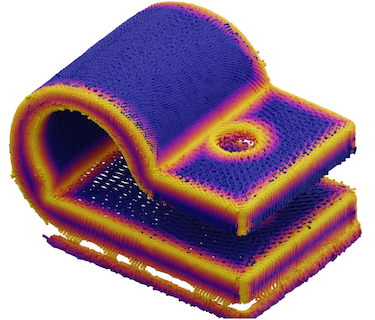
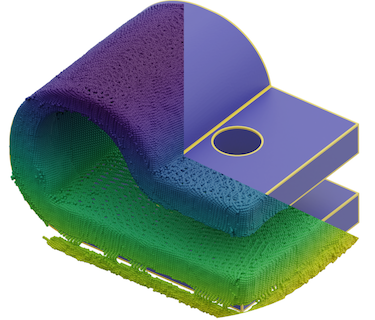
Albert Matveev, Ruslan Rakhimov, Alexey Artemov, Gleb Bobrovskikh, Vage Egiazarian, Emil Bogomolov, Daniele Panozzo, Denis Zorin, Evgeny Burnaev SIGGRAPH, 2022 project page / arXiv code Differently from existing data-driven methods for predicting sharp geometric features in sampled 3D shapes, which reduce this problem to feature classification, we propose to regress a scalar field representing the distance from point samples to the closest feature line on local patches. |

|
Egor Burkov, Ruslan Rakhimov, Aleksandr Safin, Evgeny Burnaev, Victor Lempitsky IEEE Access project page / arXiv We present an approach for the reconstruction of textured 3D meshes of human heads from one or few views. |


|
Oleg Voynov, Gleb Bobrovskikh, Pavel Karpyshev, Andrei-Timotei Ardelean, Arseniy Bozhenko, Saveliy Galochkin, Ekaterina Karmanova, Pavel Kopanev, Yaroslav Labutin-Rymsho, Ruslan Rakhimov, Aleksandr Safin, Valerii Serpiva, Alexey Artemov, Evgeny Burnaev, Dzmitry Tsetserukou, Denis Zorin CVPR, 2023 project page / arXiv A new multi-sensor dataset for 3D surface reconstruction that includes registered RGB and depth data from sensors of different resolutions and modalities under a large number of lighting conditions. |


|
Ruslan Rakhimov, Emil Bogomolov, Alexandr Notchenko, Fung Mao, Alexey Artemov, Denis Zorin, Evgeny Burnaev WACV, 2021 arXiv / code We target the problem of redesigning the DensePose R-CNN model's architecture so that the final network retains most of its accuracy but becomes more light-weight and fast. |
|
Ruslan Rakhimov, Denis Volkhonskiy, Alexey Artemov, Denis Zorin, Evgeny Burnaev VISIGRAPP, 2021 arXiv / code We predict future video frames in latent space in an autoregressive manner. |
|
Thanks to Jon Barron for the website template. |